ICOP Technology Inc. is excited to introduce new technical guides to help engineers and system integrators get started with QEC‑M‑01 (EtherCAT MDevice) in combination with NPM PULSERVOII and NPM EtherCAT Series Servo Drivers NPM EtherCAT Series Servo Drivers for real-time, high-performance motion control.

To better support semiconductor, electronics, and industrial automation industries, this guide provides a step-by-step setup process, practical code examples, and integration tips to help you maximize the performance of your EtherCAT-based motion control applications.
Highlights of the New Guide
The QEC‑M‑01 is a compact and powerful EtherCAT MDevice equipped with a real-time multitasking architecture and integrated development tools. Powered by the open-source 86Duino IDE, it offers a simple yet powerful development platform for automation.
It enables precise and responsive control in demanding motion systems when paired with NPM PULSERVOII and EC-AD Series products under the CiA402—Profile Position (PP) Mode.
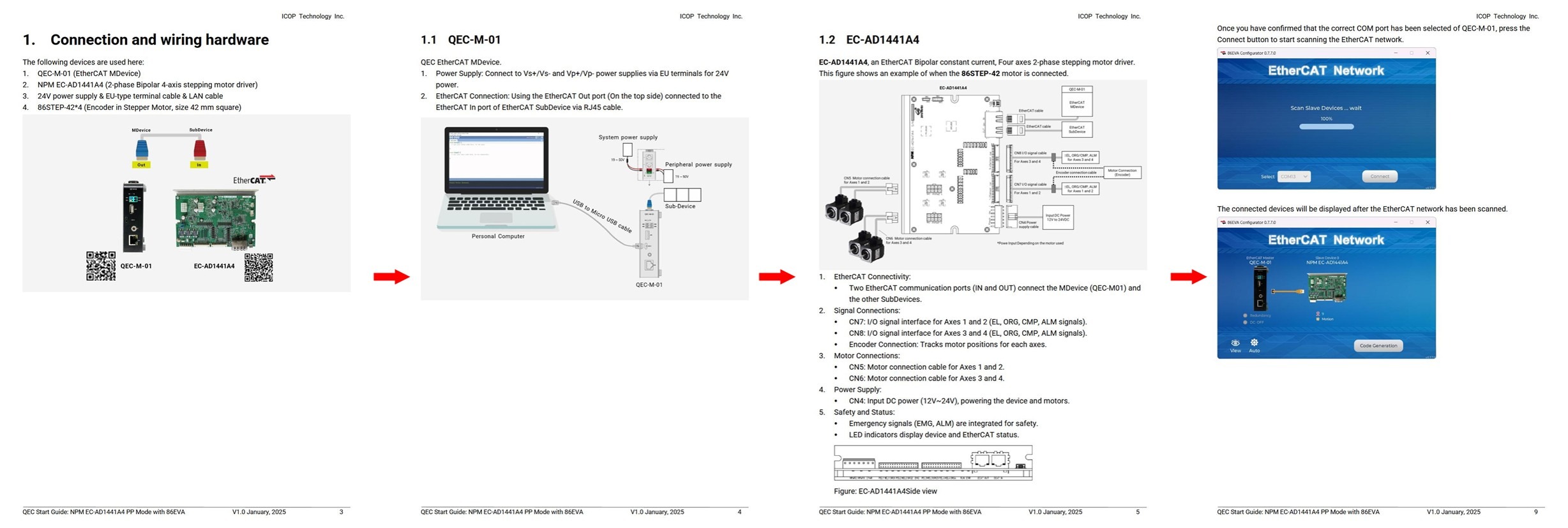
NPM PULSERVOII and EC-AD Series Drivers are EtherCAT-compatible closed-loop motor control solutions designed for high precision and stability. The PULSERVOII series combines the benefits of stepper motors with encoder feedback to eliminate missed steps, providing smooth and reliable motion control. The EC-AD Series supports CiA402 with Distributed Clock (DC) synchronization as fast as 250 μs, delivering accurate multi-axis coordination.
Both drivers are compact, highly responsive, and ideal for:
- High-Speed Assembly Systems: Ensure accurate positioning and stability in automated arms and inspection stages.
- Precision Equipment: Deliver smooth acceleration, deceleration, and origin operations for CNC machines and semiconductor tools.
Advantages of the Start Guides
- Step-by-Step Setup Guide:
Whether you’re a beginner or an experienced developer, our guide helps you correctly connect and configure the QEC-M-01 with NPM EtherCAT Drivers. - Programming Examples:
The guide includes detailed programming examples for CiA 402 – Profile Position (PP) mode, helping you achieve everything from precise positioning to flexible control. - Application Scenarios:
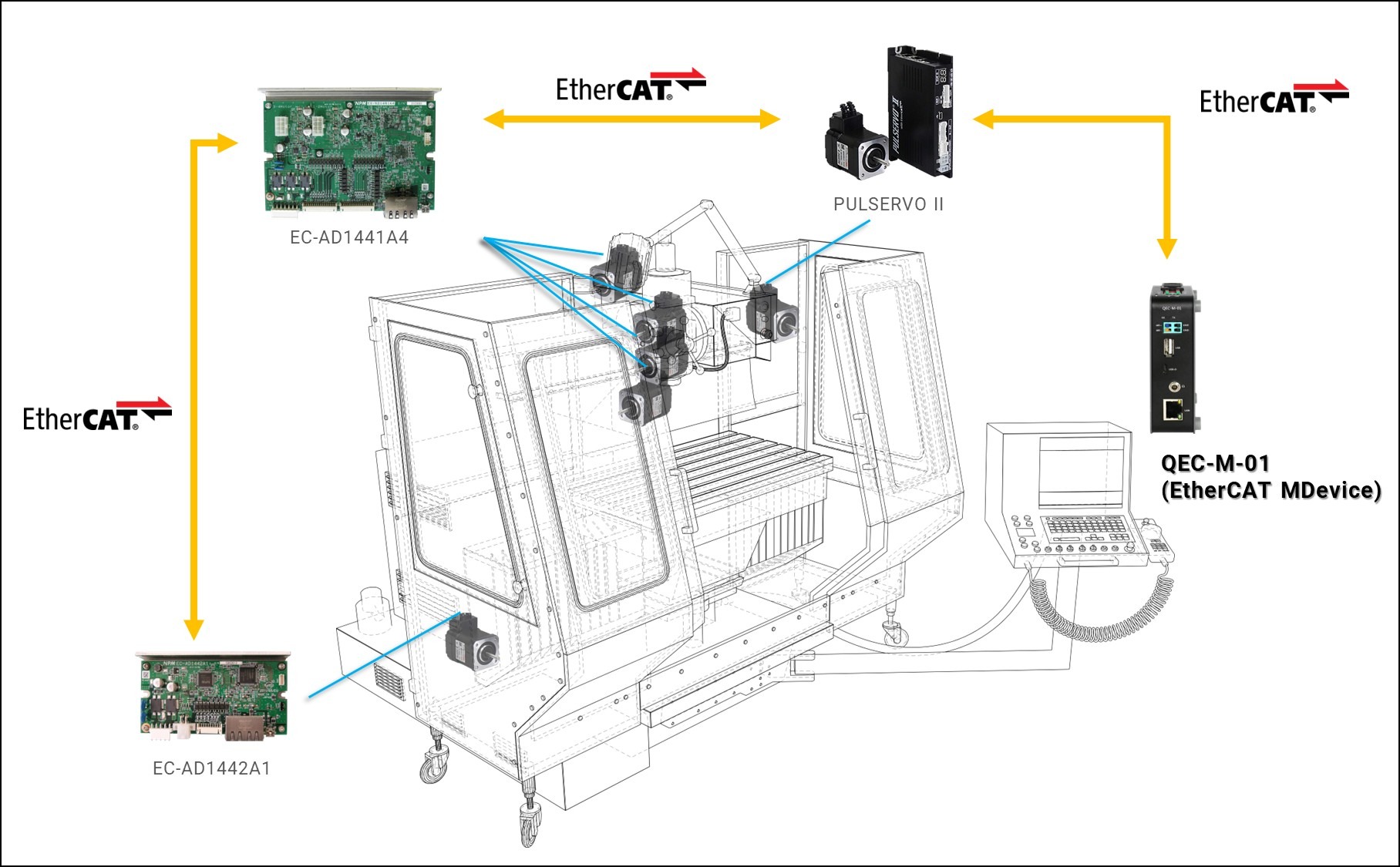
Thanks to its compact design and precision feedback, the PULSERVOII driver and EC-AD drives are ideal for multi-axis stages, robotic pick-and-place arms, and high-speed feeders in SMT or packaging lines.
Start Using QEC-M-01 And NPM EtherCAT Drivers
Whether you are new to EtherCAT or an experienced motion control developer, our guide provides all the essential tools to begin integrating QEC-M-01 with NPM EtherCAT drivers. Click the links below to explore the available guides:
- PULSERVO II
- EC-AD1442A1
- EC-AD1441A4

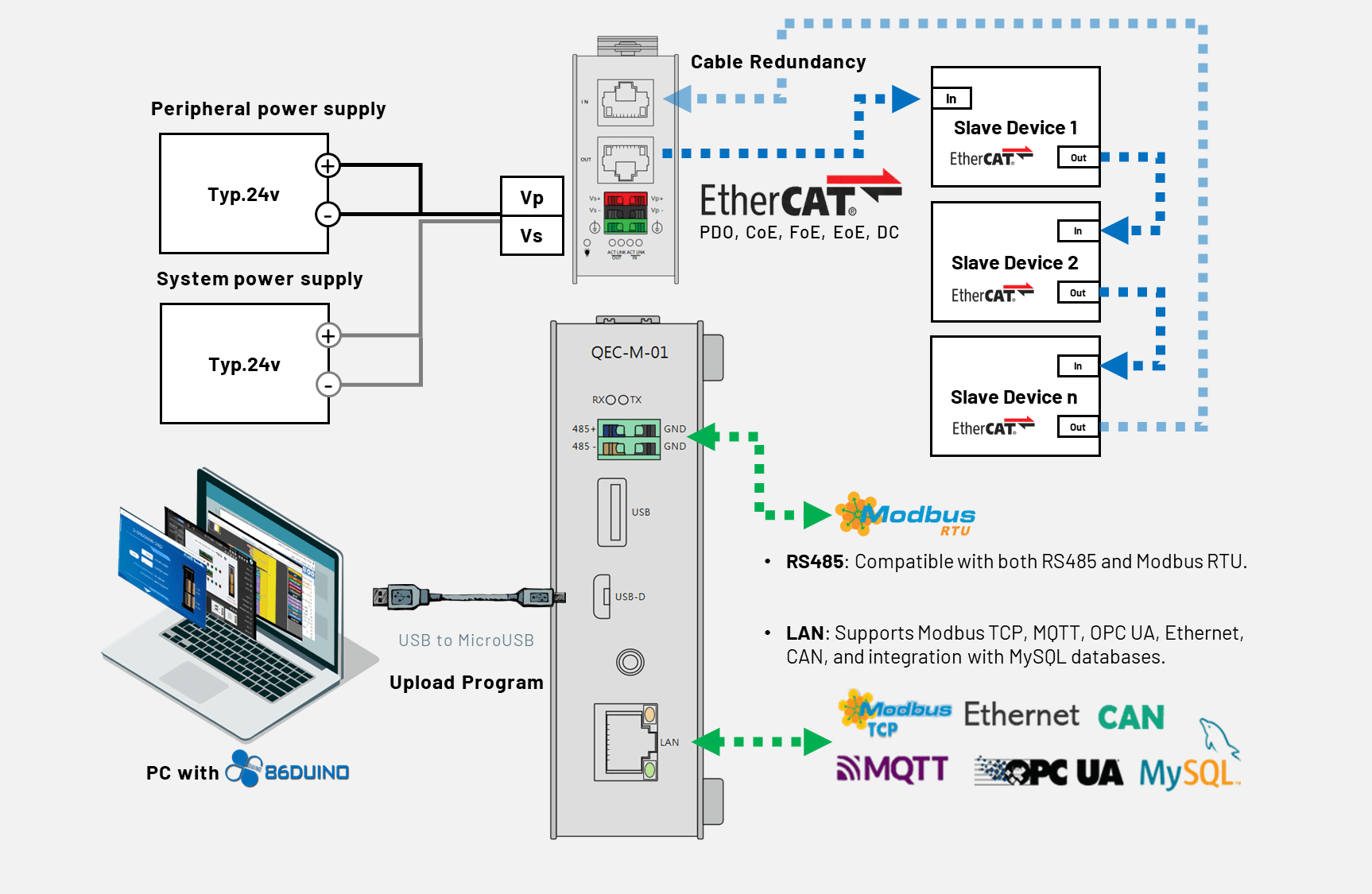
Main features of QEC-M-01:
- DM&P Vortex86EX2 Processor, Master 533MHz/Slave 400MHz
- EtherCAT MDevice Core runs on a dedicated CPU
- Hardware/Software Real-time
- 86Duino Integrated Development Environment
- Up to 128 axes support, motion control
- Internal Monitoring Hardware Information
- Operating temperature -20 to +70°C/-40 to +85°C (Opt.)
- 3LAN / USB / MicroUSB / RS485 / Audio
 |  |  |
| PULSERVO II | EC-AD1442A1 | EC-AD1441A4 |
ICOP Technology Inc. continues to deliver robust and innovative EtherCAT automation platforms for smarter, faster, and more efficient control systems. We invite partners and developers to explore QEC solutions for your next smart automation project.
For more info and sample request, please write to info@icop.com.tw, call your nearest ICOP Branch, or contact our Worldwide Official Distributor.


![[Technical Tips] Upload the LCD BIOS by using the batch file to the VDX boards](https://icop-shop.com/wp-content/uploads/2026/02/Technical-Tips-Upload-the-LCD-BIOS-by-using-the-batch-file-to-the-VDX-boards-300x201.png)
![[Technical tips] Start Guides for QEC-M-01 and SANYO DENKI SANMOTION G Series (CSP PP)](https://icop-shop.com/wp-content/uploads/2026/02/Technical-tips-Start-Guides-for-QEC-M-01-and-SANYO-DENKI-SANMOTION-G-Series-CSP-PP-300x201.png)
![[Technical Tips] How to install CentOS Stream 9 on EB-58N Mini PC](https://icop-shop.com/wp-content/uploads/2026/02/Technical-Tips-How-to-install-CentOS-Stream-9-on-EB-58N-Mini-PC-300x201.png)
