ICOP Technology Inc. 欣然推出全新技術指南,協助工程師與系統整合商運用 QEC‑M‑01 (EtherCAT 運動裝置)搭配 NPM PULSERVOII 與 NPM EtherCAT Series Servo Drivers NPM EtherCAT 系列伺服驅動器,實現即時高效能運動控制。

為更完善地支援半導體、電子及工業自動化產業,本指南提供逐步設定流程、實用程式碼範例與整合技巧,協助您充分發揮基於 EtherCAT 的運動控制應用效能。
新指南重點摘要
QEC‑M‑01 是一款緊湊而強大的 EtherCAT 從屬裝置,配備即時多工架構與整合式開發工具。其核心採用開源 86Duino IDE它提供了一個簡單卻強大的自動化開發平台。
當搭配NPM PULSERVOII及EC-AD系列產品,並採用CiA402—輪廓位置(PP)模式時,可實現對高要求運動系統的精準且反應靈敏的控制。
NPM PULSERVOII 與 EC-AD 系列驅動器是符合 EtherCAT 標準的閉環馬達控制解決方案,專為實現高精度與穩定性而設計。PULSERVOII 系列結合步進馬達優勢與編碼器反饋技術,有效消除失步現象,實現平穩可靠的運動控制。EC-AD 系列支援 CiA402 標準,透過分散式時鐘 (DC) 同步技術實現高達 250 微秒的高速同步,提供精準的多軸協調控制。
兩款驅動器均體積小巧、反應靈敏,是以下應用的理想選擇:
- 高速裝配系統: 確保自動化機械臂與檢測平台的精準定位與穩定性。
- 精密設備: 為數控機床與半導體設備提供平穩的加速、減速及原點操作功能。
入門指南的優勢
- 逐步設定指南:
無論您是初學者還是經驗豐富的開發人員,我們的指南都能協助您正確連接並設定 QEC-M-01 與 NPM EtherCAT 驅動程式。 - 程式設計範例:
本指南包含針對 CiA 402 – 輪廓定位 (PP) 模式的詳細程式設計範例,協助您實現從精確定位到靈活控制的各項需求。 - 應用場景:
憑藉其緊湊設計與精準回饋特性,PULSERVOII驅動器與EC-AD驅動器是多軸平台、機器人拾放臂,以及SMT或包裝生產線中高速送料器的理想選擇。
開始使用 QEC-M-01 與 NPM EtherCAT 驅動程式
無論您是初次接觸 EtherCAT,還是經驗豐富的運動控制開發人員,我們的指南都提供整合 QEC-M-01 與 NPM EtherCAT 驅動程式所需的所有關鍵工具。點擊下方連結探索可用指南:
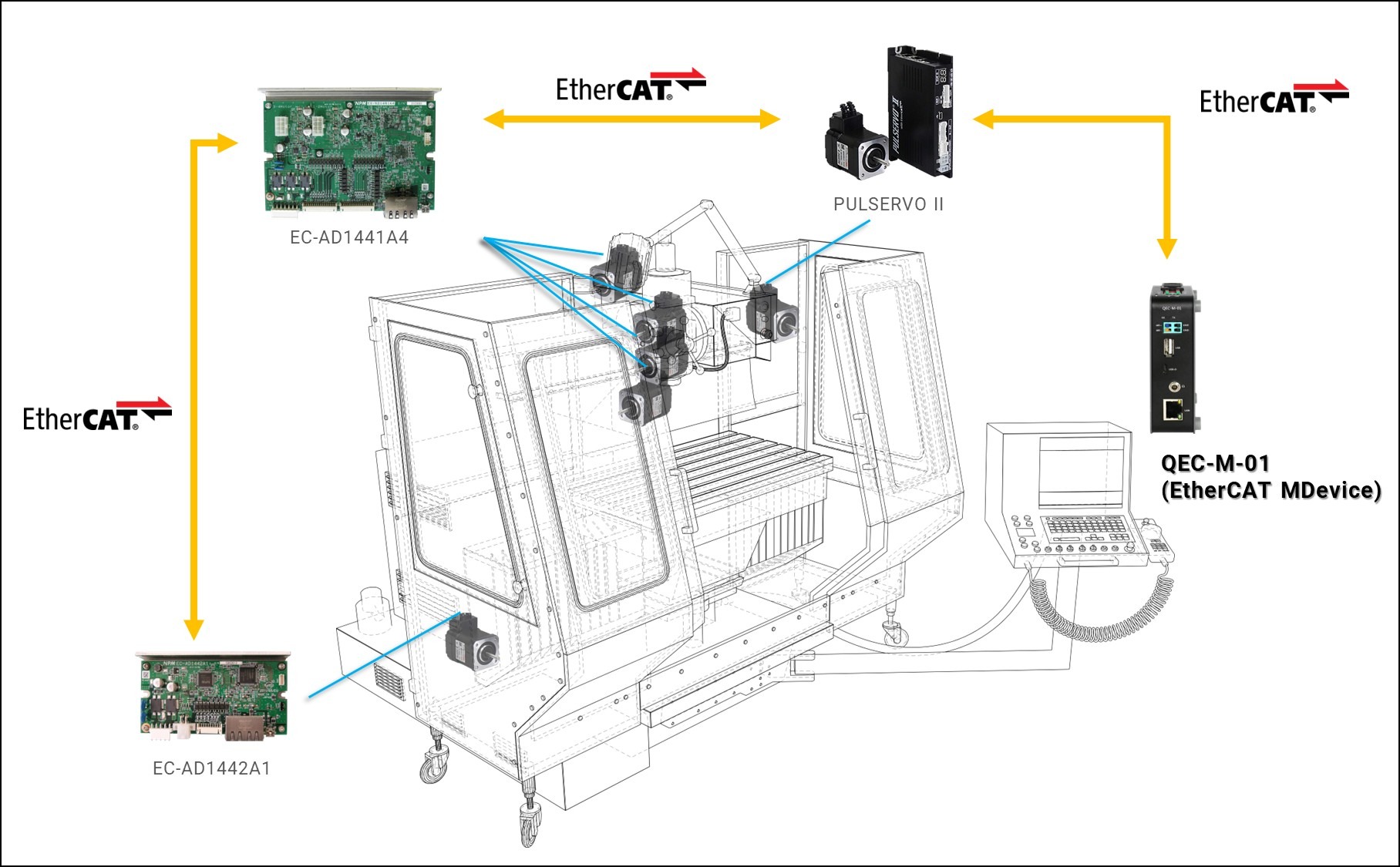
- PULSERVO II
- EC-AD1442A1
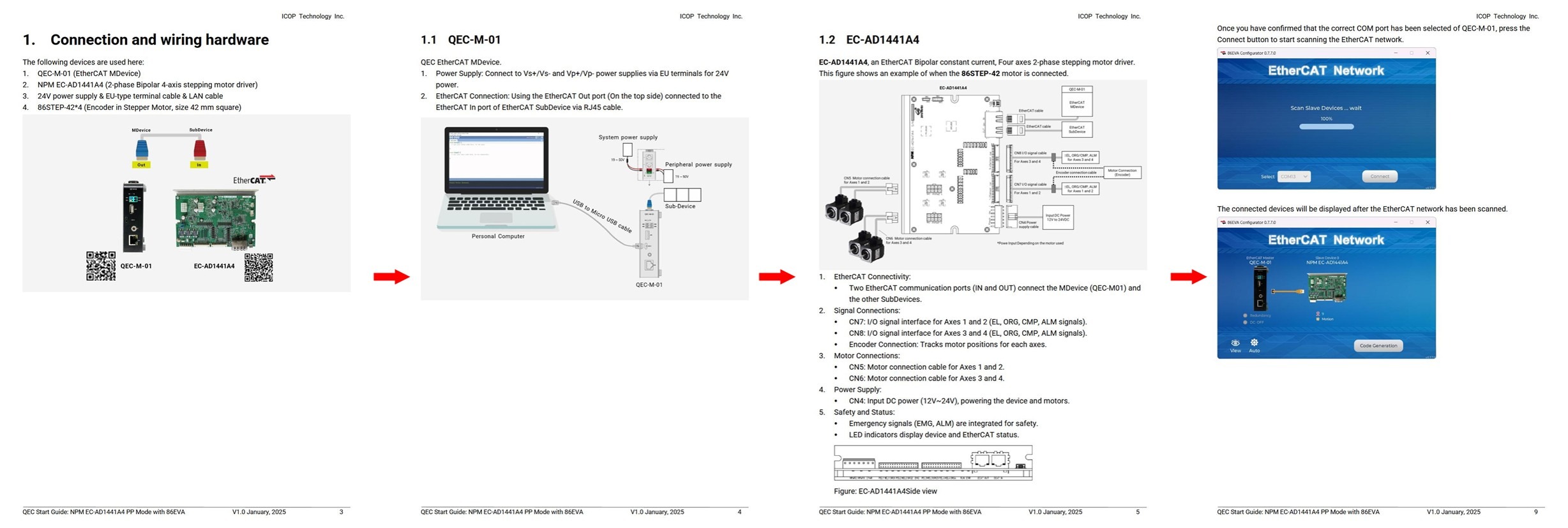
- EC-AD1441A4

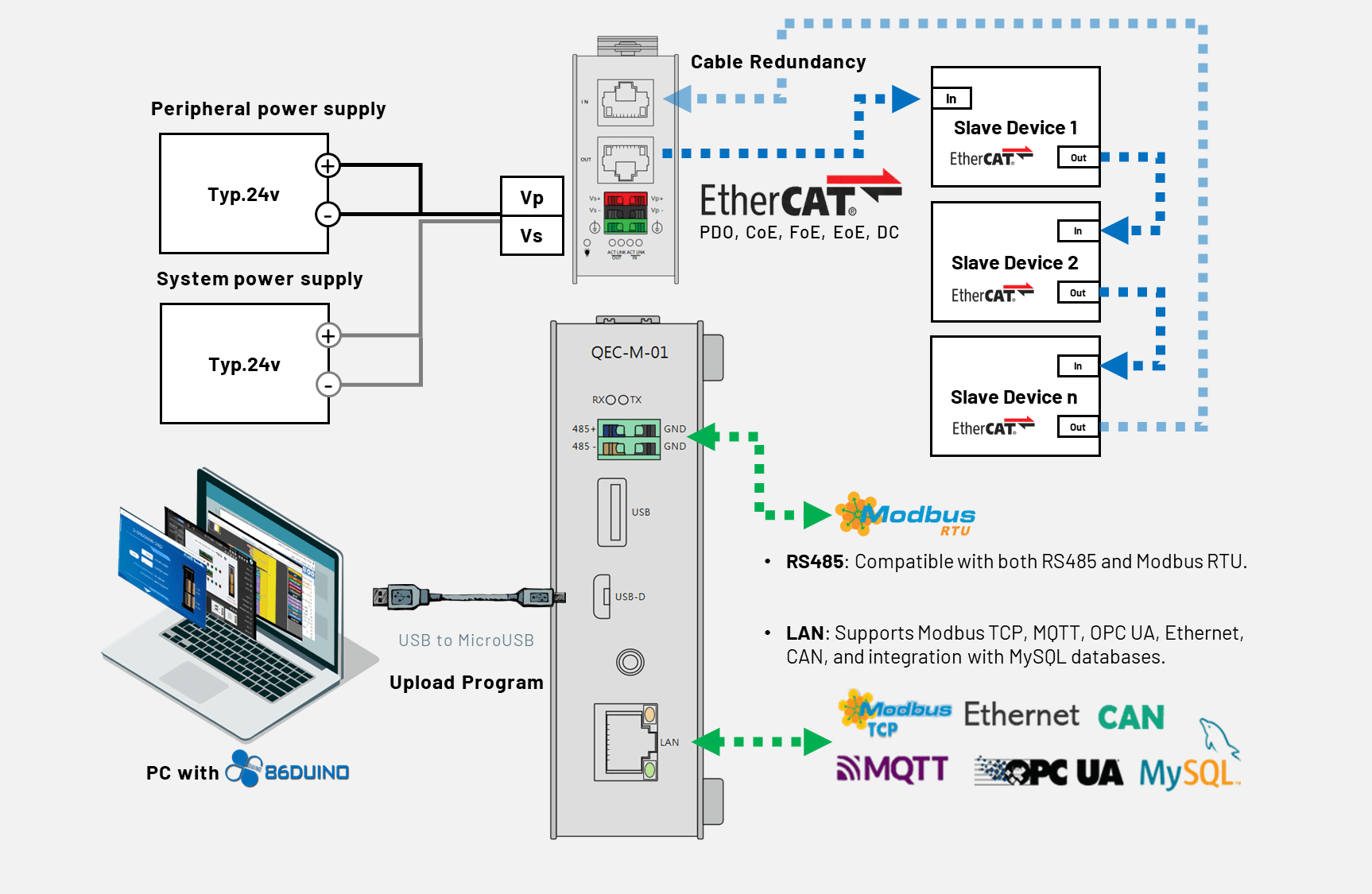
主要特點 QEC-M-01:
- DM&P Vortex86EX2 處理器,主站 533MHz/從站 400MHz
- EtherCAT MDevice Core 運行於專用 CPU 上
- 硬件/軟件 實時
- 86Duino 整合開發環境
- 最多支援 128 軸,運動控制
- 內部監控硬件信息
- 工作溫度 -20 至 +70°C / -40 至 +85°C(選配)
- 3LAN / USB / MicroUSB / RS485 / 音訊
 |  |  |
| PULSERVO II | EC-AD1442A1 | EC-AD1441A4 |
ICOP Technology Inc.持續提供強大且創新的EtherCAT自動化平台,打造更智能、更快速、更高效的控制系統。誠邀合作夥伴與開發者探索QEC解決方案,為您的下一個智能自動化專案注入新動能。
如果想了解相關資訊及需求,請點選訊息於此處 info@icop.com.tw,或致電離您最近的 ICOP 分公司,或聯繫我們的 全球授權經銷商.


![[Technical Tips] Upload the LCD BIOS by using the batch file to the VDX boards](https://icop-shop.com/wp-content/uploads/2026/02/Technical-Tips-Upload-the-LCD-BIOS-by-using-the-batch-file-to-the-VDX-boards-300x201.png)
![[Technical tips] Start Guides for QEC-M-01 and SANYO DENKI SANMOTION G Series (CSP PP)](https://icop-shop.com/wp-content/uploads/2026/02/Technical-tips-Start-Guides-for-QEC-M-01-and-SANYO-DENKI-SANMOTION-G-Series-CSP-PP-300x201.png)
![[Technical Tips] How to install CentOS Stream 9 on EB-58N Mini PC](https://icop-shop.com/wp-content/uploads/2026/02/Technical-Tips-How-to-install-CentOS-Stream-9-on-EB-58N-Mini-PC-300x201.png)
