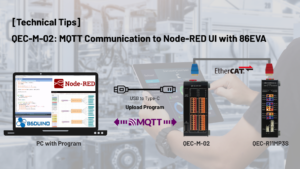
隨著 6 軸機械手臂的應用日益普及,系統整合商與原始設備製造商(OEM)經常面臨複雜的控制需求、嚴格的同步要求,以及人機介面(HMI)與運動控制整合方面的挑戰。
實用的 EtherCAT 架構與開發工作流程
協助系統整合商與原始設備製造商加速機器人手臂應用開發
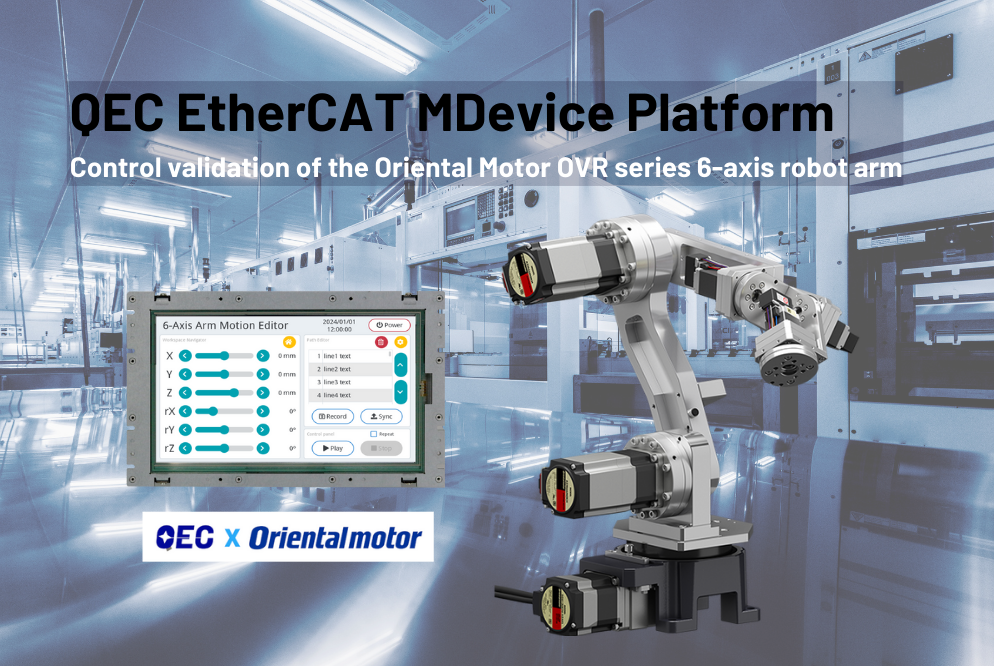
ICOP Technology 近期已完成對 Oriental Motor OVR 系列 6 軸機械手臂 使用 QEC EtherCAT MDevice 進行的整合與控制驗證。 基於 EtherCAT 的機械手臂控制與開發架構 該解決方案適用於實際設備部署,可作為進行二次開發與專案整合的系統整合商及原始設備製造商(OEM)的技術參考。

基於 EtherCAT 的 6 軸機械手臂控制架構
該驗證系統採用 QEC-M-090T 作為整合式 EtherCAT MDevice 與 HMI 平台。透過即時 EtherCAT 通訊,控制器連接至 OVR 6 軸機械手臂驅動器,形成單節點的運動控制 + HMI 架構。
系統的主要組件包括:
- 控制核心:QEC-M-090T(MDevice + HMI)
該系統在 ECAT_SYNC 模式下搭配分散式時鐘運作,提供接線與初始參數範本、歸位程序及安全機制。
內建的 ArduBlock 與 86HMI 讓初學者能夠快速建立運動行為原型,並監控 PDO 資料。

- 驅動核心與機構:OVR6048K1-V + AZD-KRED × 6
官方建議的節點順序與佈線拓撲已完整視覺化呈現。為確保一致性,禁止交換軸向 SubDevice ↔ 軸映射. 文件包含 零位姿定義、軸解析度及運動限制,可大幅降低首次整合的風險。

- 三大工程基礎要素
- Motion86 API / ArduBlock 模組
最基本的直線與圓形運動、歸位控制、停止邏輯,以及狀態機封裝。工程師可以先使用模組進行原型開發,隨後無縫過渡至 API。

- 運動學檢視器
FK/IK、可達工作空間及奇點的可視化呈現。
支援路徑檔案載入、逐點驗證及錯誤提示。
匯出 X、Y、Z、rX、rY、rZ 參數,可一鍵注入控制層。

- LVGL / 86HMI
即時顯示機器人的姿態、位置及警報。
使用者介面與 EtherCAT 週期同步運行,確保監控不會干擾控制迴路。

- Motion86 API / ArduBlock 模組
開發工作流程:從外骨骼/內骨骼驗證到動作執行
在軟體層面上,ICOP 採用 86Duino IDE (開源、C/C++ 架構)作為主要開發環境,並建立了一套可重複使用的機械手臂控制工作流程:
- 正向/逆向運動學 (FK / IK) 驗證
機器人的運動學模型已在系統層級進行驗證,以確保座標轉換與關節角度計算的準確性。 - EtherCAT 運動控制通訊整合
指令會透過 EtherCAT 同步傳送至所有軸,確保多軸協調運動的一致性。 - 人機介面整合與狀態監控
關節狀態、機器人姿勢及操作流程已整合至觸控螢幕介面中,供現場操作與調校使用。 - 錄製/調音/儲存/播放的工作流程設計
支援動態錄製、參數調校及重播機制,是設備調試與應用驗證不可或缺的工具。
此工作流程可在設備上部署機器人手臂應用程式時,作為標準開發參考,從而降低初期整合的風險。
快速入門與下載資源
- 開發指南
QECM090T x Orientalmotor OVR6048K1-V(v1r2).pdf - 86Duino IDE 軟體下載
86Duino Coding 501 Preview OVR6048K1.zip (密碼:icop) - EtherCAT API 手冊
EtherCAT Library API User Manual - 86HMI 工具手冊
86HMI Editor User Manual - PoC / 技術諮詢
info@icop.com.tw

系統整合商與原始設備製造商(OEM)的技術價值
透過此次整合驗證,ICOP 展示了 QEC EtherCAT MDevice 平台在 6 軸機械手臂應用中的多項實用優勢:
- 可預測的即時控制行為,適用於同步多軸運動及複雜軌跡
- 簡化系統架構,將 EtherCAT 主站、人機介面 (HMI) 及運動控制整合至單一工業平台
- 開放式開發環境,讓系統整合商能夠進行高效的二次開發與客製化
- 以設備為導向的部署,是在實際機器上經過驗證,而非僅限於實驗室演示
此架構特別適合已採用 — 或正在評估 — Oriental Motor OVR 6 軸機械手臂 ,並希望對運動層與應用層保有完全控制權的機械製造商及系統整合商。
邁向未來的合作
ICOP 將持續以 QEC EtherCAT 平台為基礎,深化與 Oriental Motor 所提供之機械手臂及馬達解決方案的技術整合,並提供:
- 關於 OVR 機械手臂控制架構的技術交流
- 機器人手臂應用之 EtherCAT 系統設計諮詢
- 以專案為導向的驗證與共同開發討論
透過更緊密的技术合作,ICOP 致力於協助客戶縮短開發週期,並擴大機器人手臂應用在工業設備中的部署。
如果您正計劃部署 — 或已部署 — Oriental Motor OVR 6 軸機械手臂,並希望進一步探索基於 EtherCAT 的控制架構與開發工作流程,請聯絡 ICOP 進行技術討論與專案諮詢。
如需更多資訊與樣品申請,請聯絡 info@icop.com.tw,或致電離您最近的 ICOP 分公司,或聯繫我們的 全球官方經銷商。
![eShop Article Banner_[Technical Tips] Getting Started with 86HMI Editor and ArduBlock Simple HMI Light Control Example](https://icop-shop.com/wp-content/uploads/2026/06/eShop-Article-Banner_Technical-Tips-Getting-Started-with-86HMI-Editor-and-ArduBlock-Simple-HMI-Light-Control-Example-300x201.png)