The ICOP QEC-M-02 is an EtherCAT MDevice powered by the Vortex86EX2 processor, featuring two independent cores that efficiently handle real-time fieldbus communication and user applications.
Efficient Development with 86Duino IDE
The development environment utilizes 86Duino IDE, an industrial Arduino-like platform that supports EtherCAT API, graphical programming tools, and high-level C/C++ programming, enabling rapid development while reducing hiring challenges and time to market. Beyond EtherCAT, the QEC-M-02 also supports Modbus, Ethernet TCP/IP, and CAN bus, providing a complete industrial automation solution.
Real-Time Precision for Motion and I/O Control
With a precise synchronization cycle of 125μs (min.) and jitter time under 1μs, the QEC-M-02 is designed for highly synchronized motion and I/O control applications, making it ideal for precision automation. (Read More: EtherCAT MDevice Benchmark)
Robust Storage, Reliable I/O, and Versatile Connectivity with compact size
For storage and stability, the QEC-M-02 integrates 2GB SLC eMMC, ensuring a reliable operating system. Users can easily upload executable files, HMI images, or data via 86Duino IDE without impacting master system performance.
The QEC-M-02 includes 16 isolated digital input channels and 16 isolated digital output channels, supporting NPN and PNP sink configurations with a safe operating frequency of up to 3000 Hz. The digital output supports load voltages up to 60VDC, with a typical current of 500mA per channel and a peak current of 1000mA. Isolation protection is rated at 2500 vrms (input) and 1500 vrms (output), ensuring reliability and safety in industrial environments.
For display functionality, the QEC-M-02 features an HDMI output (1280 x 720 x 256) and supports LVGL and the 86HMI editor, making it an excellent solution for HMI applications.
In terms of connectivity, the QEC-M-02 offers EtherCAT, Giga LAN, USB, COM, HDMI, a rotary switch, and a RUN/STOP switch, providing flexible integration options with off-the-shelf APIs for automation projects.
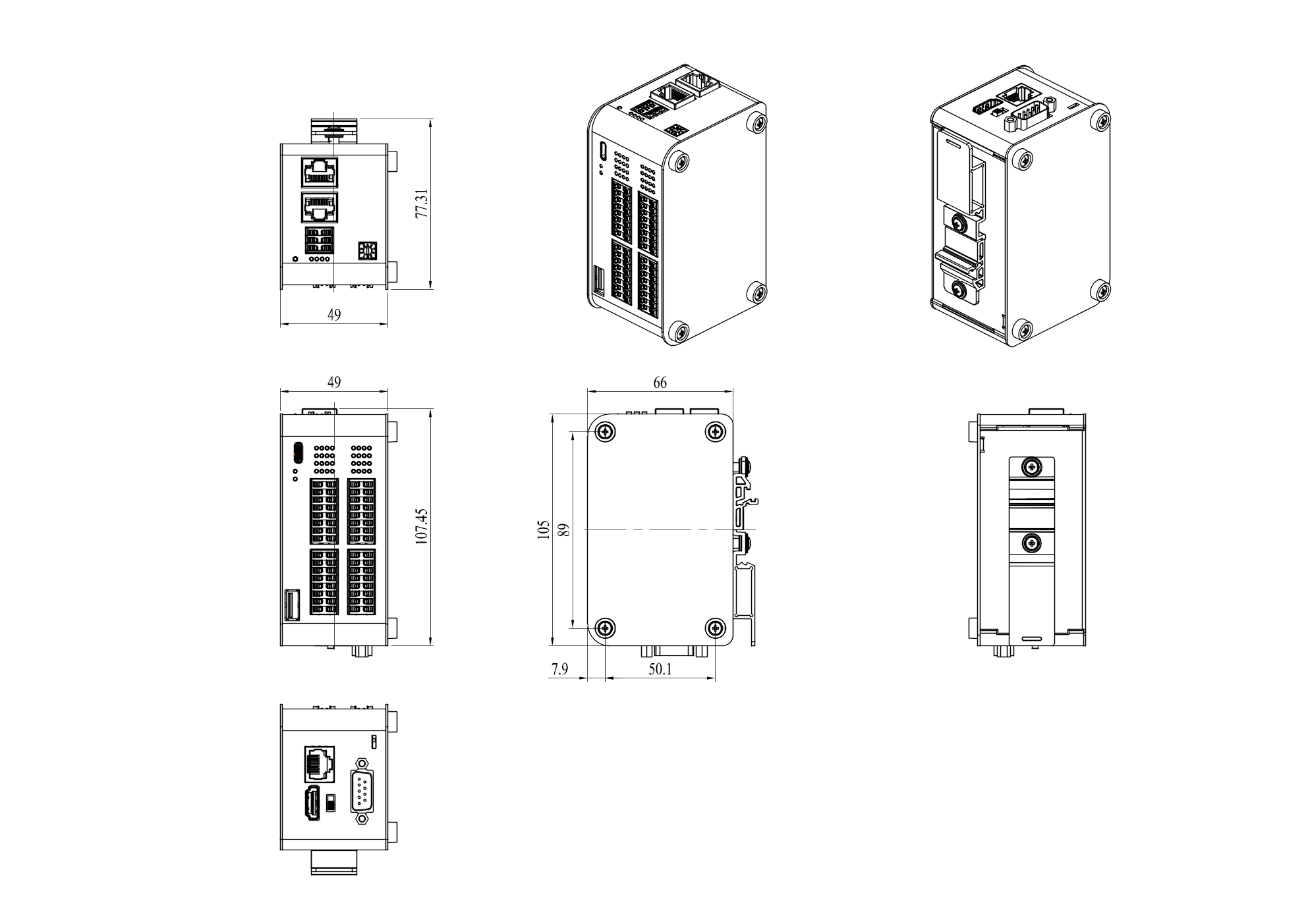
Measuring 107.45 x 49 x 77.31 mm and weighing only 370g, the QEC-M-02 supports DIN-rail mounting with a robust Euroblock terminal block for easy installation and wiring. It operates in a temperature range of -20°C to +70°C (with an optional -40°C to +85°C variant) and features built-in monitoring for temperature, voltage, current, and startup time, ensuring optimal system performance in industrial environments.
サイズ