El ICOP QEC-M-02 es un dispositivo EtherCAT MDevice equipado con el procesador Vortex86EX2, que cuenta con dos núcleos independientes que gestionan de manera eficiente la comunicación del bus de campo en tiempo real y las aplicaciones de usuario.
Desarrollo eficiente con 86Duino IDE
El entorno de desarrollo utiliza 86Duino IDE, una plataforma industrial similar a Arduino que admite la API EtherCAT, herramientas de programación gráfica y programación C/C++ de alto nivel, lo que permite un desarrollo rápido al tiempo que reduce los retos de contratación y el tiempo de comercialización. Además de EtherCAT, el QEC-M-02 también es compatible con Modbus, Ethernet TCP/IP y bus CAN, lo que proporciona una solución completa de automatización industrial.
Precisión en tiempo real para el control del movimiento y las E/S
Con un ciclo de sincronización preciso de 125 μs (mín.) y un tiempo de fluctuación inferior a 1 μs, el QEC-M-02 está diseñado para aplicaciones de control de E/S y movimiento altamente sincronizadas, lo que lo hace ideal para la automatización de precisión. (Más información: Prueba de rendimiento de EtherCAT MDevice)
Almacenamiento robusto, E/S confiable y conectividad versátil con un tamaño compacto
Para mayor almacenamiento y estabilidad, el QEC-M-02 integra 2 GB de SLC eMMC, lo que garantiza un sistema operativo confiable. Los usuarios pueden cargar fácilmente archivos ejecutables, imágenes HMI o datos a través de 86Duino IDE sin afectar el rendimiento del sistema maestro.
El QEC-M-02 incluye 16 canales de entrada digital aislados y 16 canales de salida digital aislados, compatibles con configuraciones de sumidero NPN y PNP con una frecuencia de funcionamiento segura de hasta 3000 Hz. La salida digital admite voltajes de carga de hasta 60 VCC, con una corriente típica de 500 mA por canal y una corriente máxima de 1000 mA. La protección de aislamiento tiene una clasificación de 2500 vrms (entrada) y 1500 vrms (salida), lo que garantiza la fiabilidad y la seguridad en entornos industriales.
En cuanto a la funcionalidad de visualización, el QEC-M-02 cuenta con una salida HDMI (1280 x 720 x 256) y es compatible con LVGL y el editor 86HMI, lo que lo convierte en una excelente solución para aplicaciones HMI.
En cuanto a conectividad, el QEC-M-02 ofrece EtherCAT, Giga LAN, USB, COM, HDMI, un interruptor giratorio y un interruptor RUN/STOP, lo que proporciona opciones de integración flexibles con API estándar para proyectos de automatización.
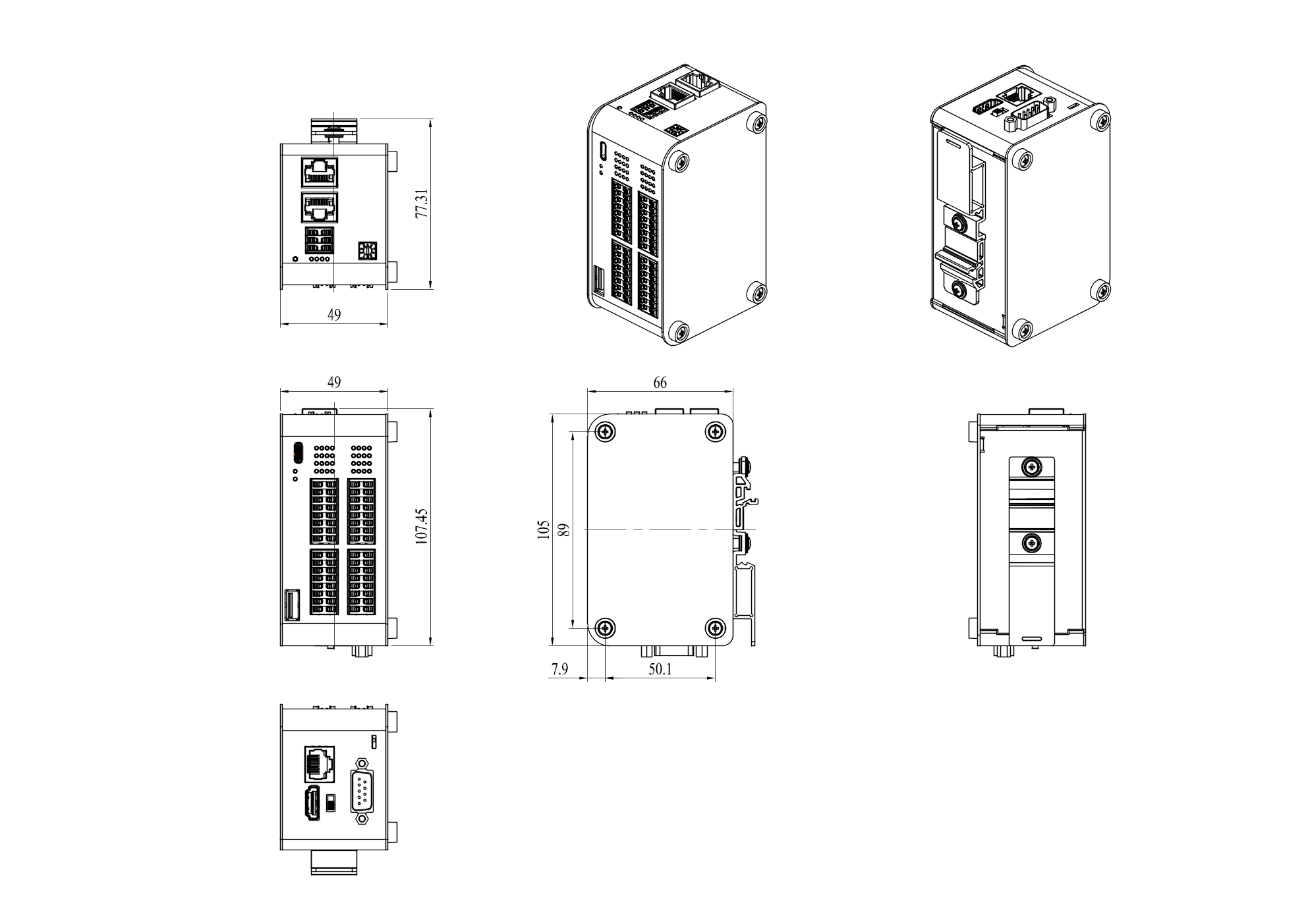
Con unas dimensiones de 107,45 x 49 x 77,31 mm y un peso de solo 370 g, el QEC-M-02 admite el montaje en riel DIN con un robusto bloque de terminales Euroblock para facilitar la instalación y el cableado. Funciona en un rango de temperatura de -20 °C a +70 °C (con una variante opcional de -40 °C a +85 °C) y cuenta con monitorización integrada de temperatura, voltaje, corriente y tiempo de arranque, lo que garantiza un rendimiento óptimo del sistema en entornos industriales.
Dimensiones
86Duino Software

86Duino Coding IDE 501
El software del entorno de desarrollo integrado (IDE) 86Duino facilita la escritura de código y su carga en las placas 86Duino. Funciona en Windows, Mac OS X y Linux. El entorno está escrito en Java y se basa en Arduino IDE, Processing, DJGPP y otro software de código abierto.
El software de código abierto 86Duino (IDE) también es compatible con los productos QEC, lo que facilita la programación y la implementación. Para obtener instrucciones de instalación, consulte la página Introducción (Nota de lanzamiento). Para garantizar un rendimiento confiable y el acceso a las últimas actualizaciones, puede descargar el software desde nuestro centro de software oficial:
Bibliotecas
El entorno 86Duino se puede ampliar mediante el uso de bibliotecas, al igual que la mayoría de las plataformas de programación. Las bibliotecas proporcionan funcionalidades adicionales para su uso en bocetos, por ejemplo, para trabajar con hardware o manipular datos. El IDE incluye varias bibliotecas instaladas, y 86Duino es compatible con la mayoría de las bibliotecas estándar de Arduino, además de proporcionar bibliotecas específicas para utilizar las funciones de hardware específicas de 86Duino.
También puede descargar o crear sus propias bibliotecas. Véase estas instrucciones para obtener más información sobre la instalación de bibliotecas. También hay un tutorial sobre cómo escribir tus propias bibliotecas; además, puedes consultar Arduino's Guía de estilo API para obtener algunas pautas sobre cómo crear una buena API estilo Arduino para tu biblioteca.
Para utilizar una biblioteca en un boceto, selecciónela de Boceto > Importar biblioteca.
Bibliotecas estándar compatibles con Arduino
- EEPROM – Lectura y escritura en almacenamiento «permanente».
- Ethernet – para conectarse a Internet mediante el conector LAN integrado.
- Firmata – para comunicarse con aplicaciones en la computadora utilizando un protocolo serie estándar.
- LiquidCrystal – para controlar pantallas de cristal líquido (LCD).
- SD – para leer y escribir tarjetas SD.
- Servo – para controlar servomotores.
- SPI – para comunicarse con dispositivos que utilizan el bus de interfaz periférica en serie (SPI).
- SoftwareSerial – para la comunicación en serie implementada por software en pines digitales.
- Stepper – para controlar motores paso a paso.
- Wire – Interfaz de dos cables (TWI/I2C) para enviar y recibir datos a través de una red de dispositivos o sensores.
Bibliotecas exclusivas de 86Duino
- Motion86 – Convertir 86Duino en un controlador de movimiento multieje.
- Modbus – para comunicarse con diversos dispositivos Modbus ASCII/RTU/TCP.
- CANBus – para comunicarse con dispositivos que utilizan la red de área de controlador (CAN Bus).
- FirmataPlus86 – Conectando 86Duino con Scratch.
- Servo86 – Una biblioteca ampliada de servomotores para controlar el movimiento de los robots.
- AIServo86 – Una biblioteca de servomotores en serie para controlar el movimiento de los robots.
Bibliotecas EtherCAT
- EtherCAT – Convertir QEC en un sistema EtherCAT.
Bibliotecas Arduino compatibles (no estándar)
- Audio – Acceda a la interfaz de audio HD integrada mediante la API de la biblioteca de audio de Arduino Due.
- TimerOne – Acceda al temporizador de hardware de 32 bits de 86Duino mediante la API de la biblioteca Arduino TimerOne.
- MsTimer2 – Acceda al segundo temporizador de hardware de 86Duino mediante la API de la biblioteca Arduino MsTimer2.
- Time86 – Lee el temporizador RTC integrado mediante la API de la biblioteca Arduino Time.
- SCoop – Proporciona la API del Simple Cooperative Scheduler para Arduino para acceder a un entorno ligero y sencillo con el que crear potentes programas multihilo o soluciones multitarea fáciles.
Véase también la lista de otras bibliotecas de terceros de Arduino que son compatibles con 86Duino.








