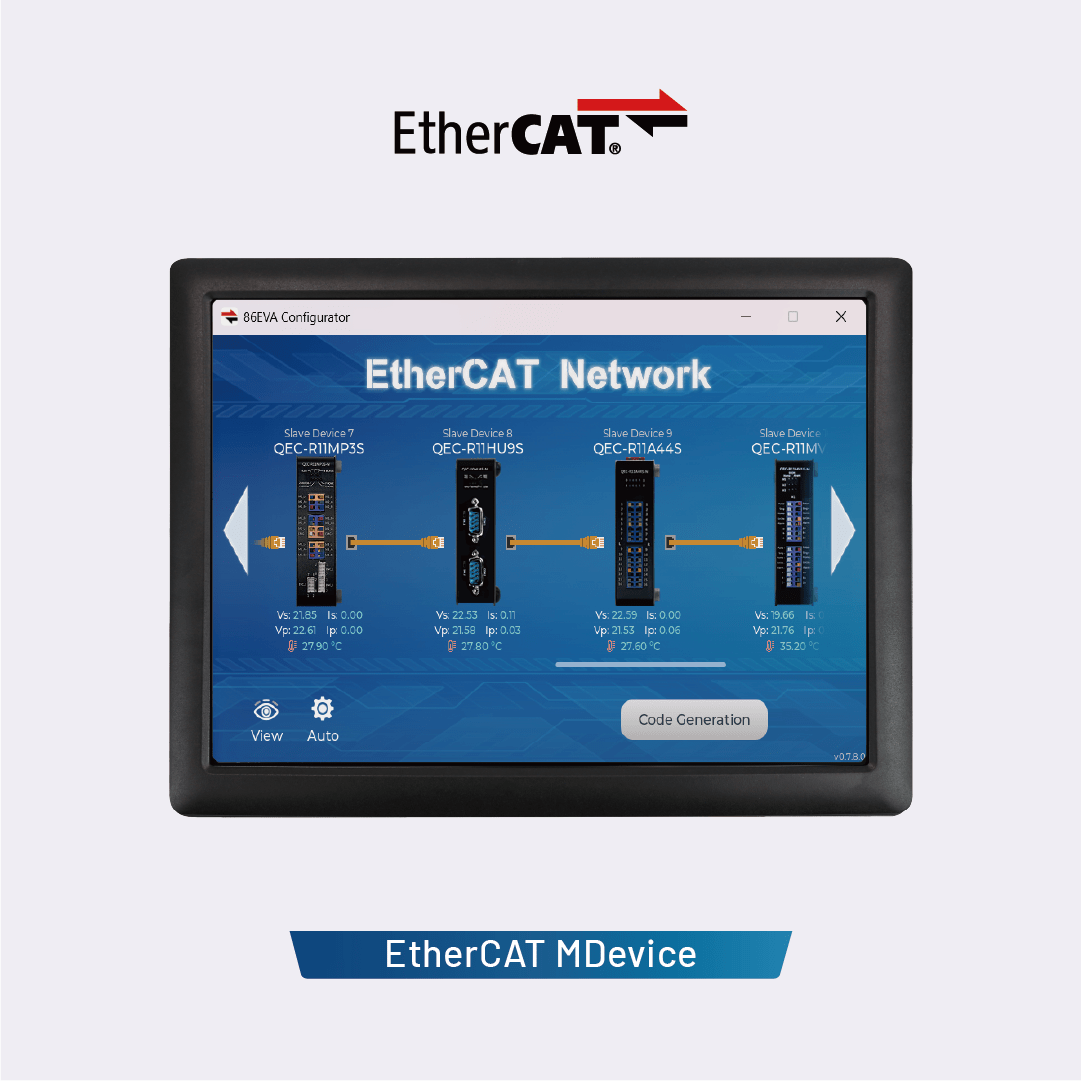
La serie QEC-PPC-M de ICOP (QEC-PPC-M-090T / QEC-PPC-M-150T) son dispositivos EtherCAT con panel y sistema LCD táctil, diseñados para un control HMI industrial en tiempo real, confiable y sincronizado. Cada modelo integra una pantalla LCD TFT táctil de alta resolución (9″ o 15″), que proporciona una carcasa resistente y un potente núcleo de control dentro de un sistema compacto.
Desarrollo eficiente con 86Duino IDE
El entorno de desarrollo utiliza 86Duino IDE, una plataforma industrial similar a Arduino que admite la API EtherCAT, herramientas de programación gráfica y programación C/C++ de alto nivel, lo que permite un desarrollo rápido al tiempo que reduce los retos de contratación y el tiempo de comercialización. Además de EtherCAT, la serie QEC-PPC-M también es compatible con Modbus TCP, Ethernet TCP/IP y bus CAN, lo que proporciona una solución completa de automatización industrial.
Precisión en tiempo real para el control del movimiento y las E/S
El QEC MDevice es compatible con funciones EtherCAT esenciales, como PDO, CoE, FoE, relojes distribuidos (DC), etc., lo que garantiza una integración flexible con dispositivos EtherCAT de terceros, como servoaccionamientos y E/S digitales. Con un tiempo de ciclo mínimo de 125 μs y una fluctuación inferior a 1 μs (a través del IDE 86Duino), es ideal para aplicaciones de control de E/S y movimiento altamente sincronizadas.
Leer más: Prueba de rendimiento de EtherCAT MDevice
Almacenamiento robusto, E/S confiable y conectividad versátil con formato integrado.
Cada modelo cuenta con una memoria eMMC SLC integrada de 2 GB, lo que garantiza un funcionamiento estable del sistema operativo y ofrece un amplio espacio de almacenamiento para ejecutables, gráficos HMI y datos de aplicaciones. Los archivos se pueden implementar a través del IDE 86Duino. El IDE también integra la biblioteca de gráficos LVGL, lo que permite a los desarrolladores crear HMI modernas e interactivas con pantalla táctil directamente en el dispositivo QEC.
Además del control EtherCAT, los modelos QEC-PPC-M supervisan la temperatura, el voltaje y la corriente del sistema, lo que proporciona datos útiles para el análisis de la huella de carbono y la estimación de la vida útil del sistema. El diseño de estructura abierta (las dimensiones varían según el modelo) permite una integración y personalización flexibles para uso industrial. La temperatura de funcionamiento estándar es de 0 °C a +60 °C, con una opción ampliada de -20 °C a +70 °C.
Cada unidad QEC-PPC-M cuenta con dos puertos EtherCAT (para redundancia), un puerto Giga LAN, tres puertos USB, un puerto USB de depuración (para carga/depuración) y audio HD, todos ellos controlables de forma accesible a través de una biblioteca estándar.
Dimensiones:
.png)
86Duino Software

86Duino Coding IDE 501
El software del entorno de desarrollo integrado (IDE) 86Duino facilita la escritura de código y su carga en las placas 86Duino. Funciona en Windows, Mac OS X y Linux. El entorno está escrito en Java y se basa en Arduino IDE, Processing, DJGPP y otro software de código abierto.
El software de código abierto 86Duino (IDE) también es compatible con los productos QEC, lo que facilita la programación y la implementación. Para obtener instrucciones de instalación, consulte la página Introducción (Nota de lanzamiento). Para garantizar un rendimiento confiable y el acceso a las últimas actualizaciones, puede descargar el software desde nuestro centro de software oficial:
Bibliotecas
El entorno 86Duino se puede ampliar mediante el uso de bibliotecas, al igual que la mayoría de las plataformas de programación. Las bibliotecas proporcionan funcionalidades adicionales para su uso en bocetos, por ejemplo, para trabajar con hardware o manipular datos. El IDE incluye varias bibliotecas instaladas, y 86Duino es compatible con la mayoría de las bibliotecas estándar de Arduino, además de proporcionar bibliotecas específicas para utilizar las funciones de hardware específicas de 86Duino.
También puede descargar o crear sus propias bibliotecas. Véase estas instrucciones para obtener más información sobre la instalación de bibliotecas. También hay un tutorial sobre cómo escribir tus propias bibliotecas; además, puedes consultar Arduino's Guía de estilo API para obtener algunas pautas sobre cómo crear una buena API estilo Arduino para tu biblioteca.
Para utilizar una biblioteca en un boceto, selecciónela de Boceto > Importar biblioteca.
Bibliotecas estándar compatibles con Arduino
- EEPROM – Lectura y escritura en almacenamiento «permanente».
- Ethernet – para conectarse a Internet mediante el conector LAN integrado.
- Firmata – para comunicarse con aplicaciones en la computadora utilizando un protocolo serie estándar.
- LiquidCrystal – para controlar pantallas de cristal líquido (LCD).
- SD – para leer y escribir tarjetas SD.
- Servo – para controlar servomotores.
- SPI – para comunicarse con dispositivos que utilizan el bus de interfaz periférica en serie (SPI).
- SoftwareSerial – para la comunicación en serie implementada por software en pines digitales.
- Stepper – para controlar motores paso a paso.
- Wire – Interfaz de dos cables (TWI/I2C) para enviar y recibir datos a través de una red de dispositivos o sensores.
Bibliotecas exclusivas de 86Duino
- Motion86 – Convertir 86Duino en un controlador de movimiento multieje.
- Modbus – para comunicarse con diversos dispositivos Modbus ASCII/RTU/TCP.
- CANBus – para comunicarse con dispositivos que utilizan la red de área de controlador (CAN Bus).
- FirmataPlus86 – Conectando 86Duino con Scratch.
- Servo86 – Una biblioteca ampliada de servomotores para controlar el movimiento de los robots.
- AIServo86 – Una biblioteca de servomotores en serie para controlar el movimiento de los robots.
Bibliotecas EtherCAT
- EtherCAT – Convertir QEC en un sistema EtherCAT.
Bibliotecas Arduino compatibles (no estándar)
- Audio – Acceda a la interfaz de audio HD integrada mediante la API de la biblioteca de audio de Arduino Due.
- TimerOne – Acceda al temporizador de hardware de 32 bits de 86Duino mediante la API de la biblioteca Arduino TimerOne.
- MsTimer2 – Acceda al segundo temporizador de hardware de 86Duino mediante la API de la biblioteca Arduino MsTimer2.
- Time86 – Lee el temporizador RTC integrado mediante la API de la biblioteca Arduino Time.
- SCoop – Proporciona la API del Simple Cooperative Scheduler para Arduino para acceder a un entorno ligero y sencillo con el que crear potentes programas multihilo o soluciones multitarea fáciles.
Véase también la lista de otras bibliotecas de terceros de Arduino que son compatibles con 86Duino.